




* * *
Рисунок
Схема
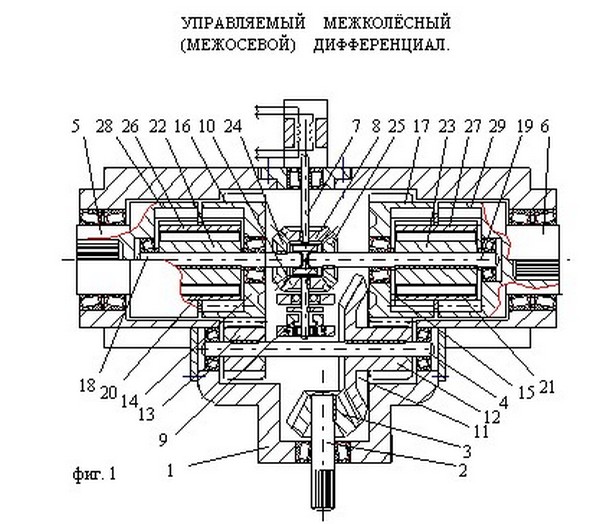
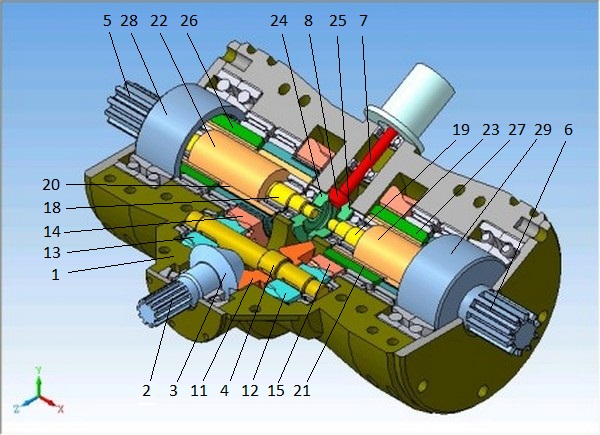
Управляемый межколёсный (межосевой) дифференциал содержит корпус 1, в котором с возможностью вращения установлены входной вал 2 с шестерней главной передачи 3, промежуточный вал 4, выходные валы 5 и 6, вал 7 управляющего привода с конической шестерней 8, муфту 9 блокировочного механизма с конической шестерней 10, ведомую шестерню 11 главной передачи на промежуточном валу 4, передаточные шестерни 12 и 13 на промежуточном валу 4, жестко связанные с ведомой шестерней 11 главной передачи, ведущие шестерни 14 и 15 двух симметричных ЦМ, выполненные заодно с ведущими цевочными колесами 16 и 17 этих ЦМ и установленные с возможностью свободного вращения на управляющих валах 18 и 19, промежуточные тела вращения, установленные на эксцентриках 22 и 23 парных управляющих валов 18 и 19, связанных друг с другом посредством конических оборачивающих шестерен 8, 10 и установленных с возможностью свободного вращения соосно выходным валам 5 и 6 на подшипниках в их гнездах, и состоящие из сдвоенных попарно сателлитов 20, 21 с цевочными венцами 26 и 27, ведомые шестерни с цевочными колесами 28, 29, выполненные заодно с выходными валами 5 и 6, управляющий привод (фиг. 1 схемы).
Управляемый межколёсный (межосевой) дифференциал работает следующим образом.
Первый режим. Свободный дифференциал. Шестерня 10 разблокирована, её вал свободно вращается в подшипниках корпуса. Электродвигатель привода обесточен, вал 7 электродвигателя свободно вращается. Крутящий момент с входного вала 2 в равных пропорциях распределяется между двумя ветвями УМД. Шестерни 14, 15 вращаются с равными угловыми скоростями. При прямолинейном движении выходные валы 5, 6 также вращаются с равными угловыми скоростями в одном направлении. Холостой ход обоих ЦМ и вращение их управляющих валов 18, 19 в одном направлении исключаются шестернями 8 и 10. При изменении направления движения транспортного средства возникающую разность моментов вращения выходных валов 5, 6, передаваемых через установленные на эксцентриках 22, 23 сдвоенные сателлиты 20, 21 на валы 18, 19 компенсирует вращение шестерен 8, 10, работающих в данном случае как сателлиты обычного дифференциала. Благодаря большим передаточным числам обоих ЦМ возможно уменьшение размеров элементов блокировочного и управляющего узлов и всего устройства.
Второй режим. Управляемый дифференциал. Шестерня 10 разблокирована, вал 7 и шестерня 8 вращаются под воздействием крутящего момента электродвигателя привода. При неподвижном её положении валы 18, 19 также неподвижны, промежуточные тела вращения со сдвоенными сателлитами 20, 21 вращаются с одинаковыми угловыми скоростями, выходные валы 5, 6 вращаются с равными угловыми скоростями. Транспортное средство движется в прямолинейном направлении. Вращением шестерни 8 в ту или иную сторону валы 18, 19 приводятся во взаимообратное симметричное вращение, один из выходных валов получает импульс к ускорению вращения, другой - к пропорциональному замедлению. Выполняется алгоритм работы полуосей колес, аналогичный традиционному при повороте, с той разницей, что в данном случае он принудительный.
Третий режим. Блокировка дифференциала. Шестерня 10 стопорится посредством муфты 9. Электродвигатель привода обесточен. Валы 18, 19 фиксируются в неподвижном положении, выходные валы 5, 6 вращаются с одинаковыми угловыми скоростями. Нагрузка в трансмиссии, возникающая при изменении направления движения транспортного средства воспринимается неподвижной шестерней 10.
Управляемый межколёсный (межосевой) дифференциал дополнительно может иметь входной (главный) дифференциал с механизмом блокировки, при этом заблокированный дифференциал позволяет на выходе всего механизма иметь разницу угловых скоростей выходных валов при равных крутящих моментах на них, а свободный дифференциал позволяет получить разницу крутящих моментов при равных угловых скоростях выходных валов.
Механизм дифференциала способен к "самообучению" при наличии компьютерного блока управления и соответствующей программы (в данном случае необходимо также наличие традиционного рулевого управления). Для этого достаточно применения трех датчиков: датчика положения рулевого колеса, датчика вращения вала электродвигателя и амперметра в цепи электродвигателя привода.
При первоначальной (заводской) настройке дифференциала, установленного на стандартно оборудованный автомобиль, для записи алгоритма работы в программу управления необходимо обкатать механизм в оптимальных дорожных условиях с перемещением управляемых колёс "от упора до упора" в режиме свободного дифференциала. В дальнейшем этот алгоритм принимается "по умолчанию" за "рабочий". При смене ведущих колёс на другие, отличные по размеру от стандартных (напр., по диаметру или величине вылета диска), блок управления перенастраивается на новый алгоритм аналогично методике, описанной выше, с занесением данных в память программы. Методика настройки механизма проста и может осуществляться непосредственно владельцем транспортного средства.
Также, по изменению нагрузки в цепи управляющего привода система может уведомлять водителя об изменении давления воздуха в шинах ведущих колёс с инициализацией процесса перепрограммирования блока управления.
Достоинство предлагаемого устройства заключается в простоте изготовления, многофункциональности, возможности адекватной настройки механизма с учетом применения колёс, отличных от стандартных, высоком КПД и нагрузочной способности циклоидальной передачи, уменьшении износа трущихся деталей за счет многопарности зацепления, широком диапазоне передаточных отношений и настройки дифференциала.
Аналоги: SH-AWD Honda, Dynamic Performance Control (DPC) BMW* * *
Ссылки по теме:
Новое поколение высокоточных редукторов для машиностроения
Перспективы применения планетарных циклоидально-цевочных передач
